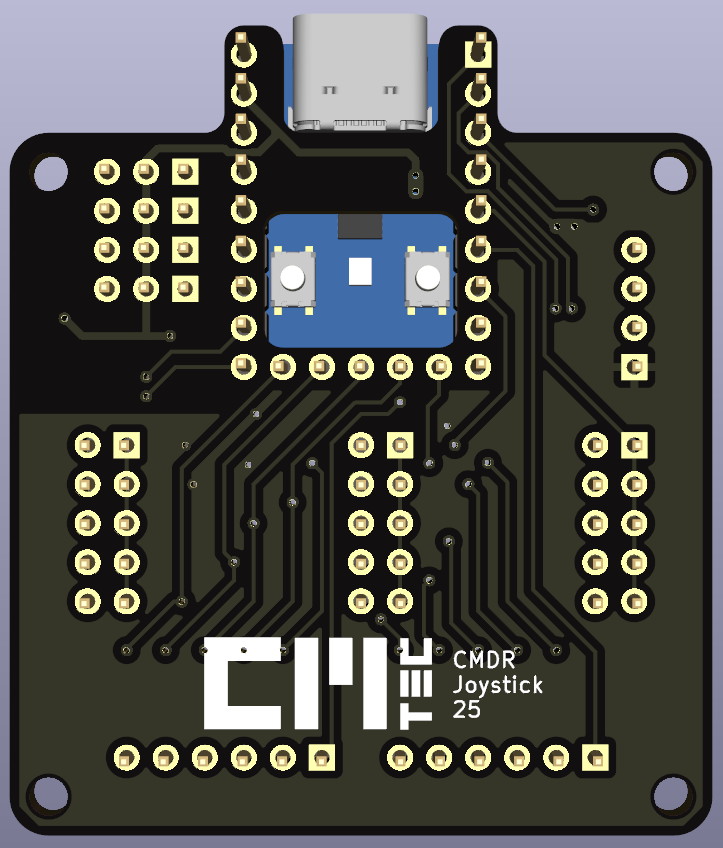
CMDR Joystick 25
RC Joystick with 2 hall effect gimbals, 2 hat switches and 25 buttons for use both with simulators and ELRS Rx equipped quads.
Layout
USB Joystick Layer 0
--------------------------------------------------------------
| FnL | B1 | | B21 | | B5 | FnR |
--------------------------------------------------------------
| | B2 | B3 | MoL | | MoR | B7 | B6 | |
| |
| | B4 | | B8 | |
| | B17 | | B18 | |
| Z/RZ X/Y |
| | H1U | | H2U | |
| | H1L | H1B | H1R || H2L | H2B | H2R | |
| | H1D | | H2D | |
--------------------------------------------------------------
USB Joystick Layer 1 (FnL)
--------------------------------------------------------------
| FnL | B9 | | B21 | | B5 | FnR |
--------------------------------------------------------------
| | B10 | B11 | MoL | | MoR | B7 | B6 | |
| |
| | B12 | | B8 | |
| | B19 | | B18 | |
| Z/RZ X/Y |
| | H3U | | H2U | |
| | H3L | H3B | H3R || H2L | H2B | H2R | |
| | H3D | | H2D | |
--------------------------------------------------------------
USB Joystick Layer 2 (FnR)
--------------------------------------------------------------
| FnL | B1 | | B21 | | B13 | FnR |
--------------------------------------------------------------
| | B2 | B3 | MoL | | MoR | B15 | B14 | |
| |
| | B4 | | B16 | |
| | B17 | | B20 | |
| Z/RZ X(RX)/Y(RY) |
| | H1U | | H4U | |
| | H1L | H1B | H1R || H4L | H4B | H4R | |
| | H1D | | H4D | |
--------------------------------------------------------------
USB Joystick Layer 3 (FnL + FnR)
--------------------------------------------------------------
| FnL | B9 | | B21 | | B13 | FnR |
--------------------------------------------------------------
| | B10 | B11 | MoL | | MoR | B15 | B14 | |
| |
| | B12 | | B16 | |
| | B19 | | B20 | |
| Z/RZ X(RX)/Y(RY) |
| | H3U | | H4U | |
| | H3L | H3B | H3R || H4L | H4B | H4R | |
| | H3D | | H4D | |
--------------------------------------------------------------
ELRS Layer
--------------------------------------------------------------
| CH7 OFF | CH7 ON | | -- | | CH8 ON | CH8 OFF|
--------------------------------------------------------------
| | CH9 ON | CH9 OFF | CH5 | | CH10 OFF | CH10 ON | CH12| |
| |
| | CH11 ON | | CH12 ON | |
| | CH11 OFF | | CH12 OFF | |
| X(CH1)/Y(CH2) X(CH3)/Y(CH4) |
| | LTU | | RTU | |
| | LTL | LTC | LTR || RTL | RTC | RTR | |
| | LTD | | RTD | |
--------------------------------------------------------------
Features
- Ergonomic design (low profile)
- Hall effect gimbals
- Supports both USB HID joystick and ELRS Tx
- Total 6x axis, 4x hat switches and 25x buttons (using Fn mode) implemented in USB HID mode
- 12 Channels implemented in ELRS mode (4x axis, 8x buttons)
Hardware
- 2x FrSky M7 or M10 gimbals
- 6x Kailh choc low profile switches
- 6x Cherry MX switches
- 2x Miniature Toggle Switch (M6 shaft, 7mm wide body)
- 2x Alpine RKJXM1015004 hat switches
- 1x Bottom case (3D printed)
- 1x Top plate (3D printed)
- 2x Hat swith top (3D printed)
1x PCB
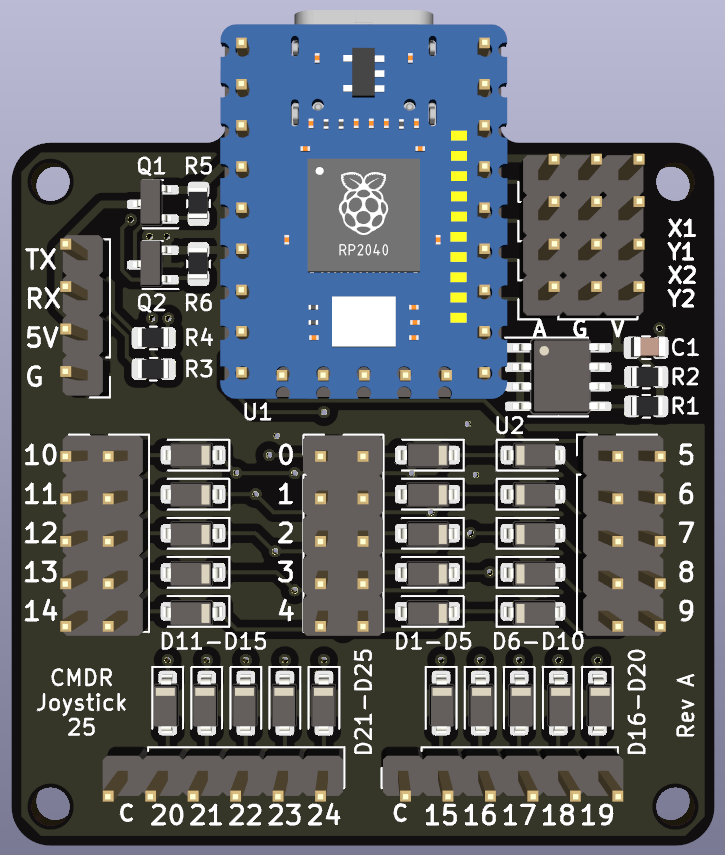
- rp2040zero pinout: jpg
- rp2040zero schematic: pdf
- eeprom 24C32LV: pdf
- P-Fet si2372eds: pdf
- N-Fet 2N7002: pdf
- Small signal diod 1N4148W: pdf
{kind=link}
1x ELRS TX
Using a EP1 TCXO Dual receiver reprogrammed as a tramsmitter
Software Build environment
Rust
-
Cargo (rust embedded)
-
Flashing via Cargo
- Pressing boot button on teensy
- Press and hold "top lower right button" when powering the unit
-
CRSF protocol description (for communicating with ELRS TX): Link
-
rp2040 datasheet: pdf
Calibration
- Center both gimbals.
- Press all righ hand side buttons except hat switch. Status led will start blinking green.
- Move both gimbals to all corners.
- Press right hat switch to save calibration data to eeprom.
Done!