CMDR Joystick
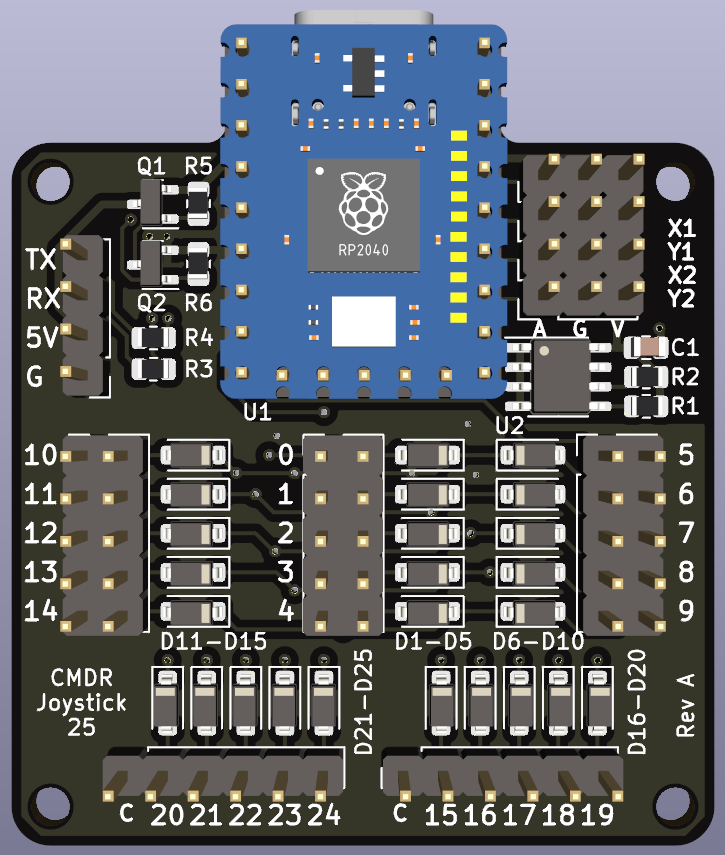
USB HID joystick firmware + hardware: 2 hall‑effect gimbals, 2 physical hat switches, and a 5x5 button matrix (plus 2 extra buttons). The firmware exposes 7 HID axes (X, Y, Z, Rx, Ry, Rz, Slider), 32 buttons and one 8‑way HAT.
Layout
HW Button index map:
---------------------------------------------------------------
| 0 L| 1 U| 25 U | | 2 | | 26 U | 4 U| 3 L|
---------------------------------------------------------------
| | 5 | 6 | 7 | | 12 | 11 | 10 | |
| |
| | 8 | | 13 | |
| | 9 | | 14 | |
| X1/Y1 X2/Y2 |
| | 16 | | 21 | |
| | 19 | 15 | 17 | | 24 | 20 | 22 | |
| | 18 | | 23 | |
---------------------------------------------------------------
USB HID joystick map :
---------------------------------------------------------------
| Fn L| B19 U| B7 U| | B32 | | B8 U| B1 U| B2 L|
---------------------------------------------------------------
| | B5 | B14 | B9 | | B10 | B15 | B6 | |
| |
| | B13 | | B17 | |
| | B16 | | B18 | |
| X1/Y1 X2/Y2 |
| | H1U | | H2U | |
| | H1L | B11 | H1R | | H2L | B12 | H2R | |
| | H1D | | H2D | |
---------------------------------------------------------------
USB HID joystick map (Fn):
---------------------------------------------------------------
| Fn L| B21 U| B27 U| | B32 | | B8 U| B3 U| B4 L|
---------------------------------------------------------------
| | TH | B22 | B26 | | B28 | B24 | B23 | |
| |
| | B29 | | B31 | |
| | B16 | | B18 | |
| X1/Y1 X2/Y2 |
| | H3U | | H4U | |
| | H3L | B20 | H3R | | H4L | B25 | H4R | |
| | H3D | | H4D | |
---------------------------------------------------------------
Config Layer (holding CONFIG button)
---------------------------------------------------------------
|BOOT L| CAL U| | CONFIG | | - | - |
---------------------------------------------------------------
| | - | - | - | | - | - | - | |
| |
| | - | | - | |
| | - | | - | |
| -/- -/- |
| | - | | - | |
| | - | - | - | | - | - | - | |
| | - | | - | |
---------------------------------------------------------------
Features
- Ergonomic design (low profile)
- Hall-effect gimbals (FrSky M7/M10)
- USB HID joystick device
- 7 axes: X, Y, Z, Rx, Ry, Rz, Slider
- 32 buttons
- 1× 8‑way HAT
- Advanced input pipeline
- Digital smoothing for stable axes
- Per-axis calibration (min/center/max) with EEPROM persistence
- Optional exponential response curves (LUT based)
- Throttle hold (capture + remap around center)
- Virtual throttle mode (map right-X to Slider; disable Z)
- 1 ms USB HID poll rate with immediate post-scan processing for minimal latency
- Status LED (WS2812 via PIO) for mode/health indication
- Power-on heartbeat (green) before USB enumeration
- Activity colors: green (active), blue (virtual throttle/calibration), orange (holds)
- Warning/error tones (red) and bootloader purple
- Idle heartbeat flashes at half speed once inputs settle
- LED turns off during USB suspend for power savings
- Power management for USB suspend/resume
- Automatic power saving when USB host suspends device
- Reduced input scanning frequency (10x slower) during suspend
- Wake-on-input detection for gimbals and buttons
- Immediate resume response when inputs detected
Low-latency firmware path
- USB interrupt endpoint configured for 1 ms poll interval (1 kHz reports)
- Input scan, smoothing, processing, and mapping now execute back-to-back
- Enhanced button debounce: 15-scan threshold (3ms) with anti-bounce protection to prevent double presses
- Smart HAT switch filtering: disables all HAT buttons when multiple directions are detected to prevent spurious inputs
- First activity after idle forces immediate USB packet without waiting for the next tick
- Existing idle timeout preserved (5 s) to avoid unnecessary host wake-ups
Hardware
- 2x FrSky M7 or M10 gimbals M7 datasheet
- 7x Kailh choc low profile switches Brown
- 8x Cherry MX switches Brown
- 2x Miniature Toggle Switch (M6 shaft, 7-8mm wide body. Ex Apem 5636) Apem 5000 series
- 2x Alpine RKJXM1015004 hat switches pdf
- 1x Bottom case (3D printed)
- 1x Top plate (3D printed)
- 2x Hat swith top (3D printed) stl
- 1x Custom PCB (CMDR Joystick rev A)
{kind=link}
Build, test, and flash (install.sh)
Use the top‑level install.sh to run tests, build, and flash. It handles
prerequisites, target setup, UF2 conversion, and optional SSH deployment.
Common commands
# Run comprehensive tests (host + embedded checks + clippy + release build)
./install.sh test
# Build and flash locally (copies UF2 to RPI-RP2 mass storage)
./install.sh flash --local
# Build and transfer UF2 via SSH to a remote machine
./install.sh flash --ssh --target user@host --mount /Volumes/RPI-RP2
# Clean build artifacts and temporary files
./install.sh clean
Entering bootloader
- Hardware: hold BOOTSEL while plugging USB
- Firmware shortcut (at power‑on): hold the front‑left‑lower button
- In‑firmware combo: Front‑left‑lower + Top‑left‑mode + Top‑right‑mode
References
- rp2040 datasheet: pdf
Calibration
- Center both gimbals.
- Start calibration (LED will flash): press Front‑left‑upper + Top‑left‑mode + Top‑right‑mode.
- Move both gimbals through full travel (all corners).
- Optional: select gimbal mode while calibrating
- M10: press Top‑left‑UP
- M7: press Top‑left‑DOWN
- Save calibration to EEPROM: press the right hat center button.
- Exit calibration: repeat step 2 combination (toggles off).
Notes
- During calibration, min/max are tracked from the smoothed ADC values.
- On mode change (M10/M7) centers are reset from the current position.
Status LED behaviour
| Condition | Colour | Pattern |
|---|---|---|
| Power (USB not enumerated yet) | Green | Fast heartbeat |
| Normal active operation | Green | Solid |
| Idle (no input activity) | Green | Slow heartbeat (½ speed) |
| Virtual throttle / calibration | Blue | Solid / heartbeat |
| Throttle hold / other overlays | Orange | Solid / heartbeat |
| Warning / Error | Red | Blink / heartbeat |
| Bootloader | Purple | Solid |
Runtime controls
- Throttle hold: press the Top‑left‑mode button to capture the current throttle value
- Press again at center to clear hold
- Virtual throttle mode: press the Top‑right‑mode button to toggle
- Disables Z axis and maps right‑X to the Slider (symmetric around center)
Development and testing
Run unit tests on host (uses std for test modules):
cd rp2040
cargo test --features std
Repo structure
rp2040/src/*.rs: firmware modules (axis, buttons, matrix, calibration, storage, HID)rp2040/memory.x: linker scriptrp2040/uf2conv.py: UF2 converter (alternative to elf2uf2‑rs)install.sh: unified helper to test, build, and flash (local or via SSH)